现代雷达系统分析与设计
一、某弹载雷达系统要求:不模糊探测距离80km;工作比不超过20%;波长l=3cm;天线等效孔径D=0.25m(直径);噪声系数F=3dB;系统损耗L=4dB;天线
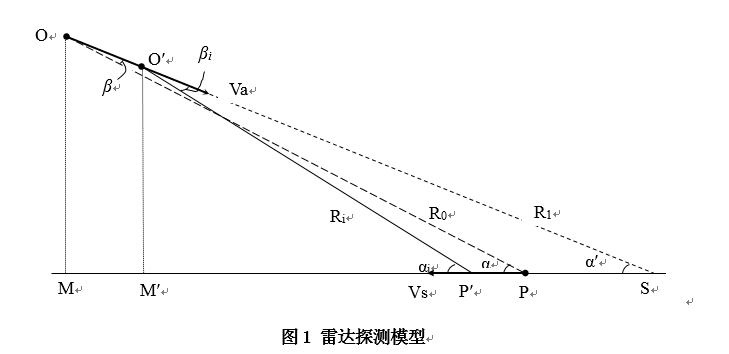
一、某弹载雷达系统要求:不模糊探测距离80km;工作比不超过20%;波长l=3cm;天线等效孔径D=0.25m(直径);噪声系数F=3dB;系统损耗L=4dB;天线波束宽度θ3dB =6°;目标的RCS:s=1500 m2。弹目之间的相对运动关系如图。目标航速Vs=10~30m/s(任取一值),导弹运动速度Va=600m/s,目标航向与弹轴方向之间的夹角为α′=30°,目标偏离弹轴方向的角度为β=1°,则在舰船位置P,导弹对目标视线与目标航向的夹角α=α′+β。从t=0时刻开始,导弹从O向O’位置运动, 目标从P向P’位置运动。
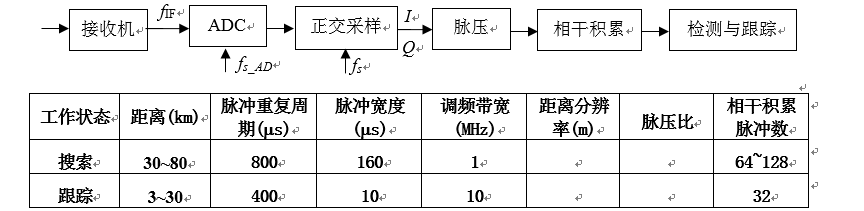
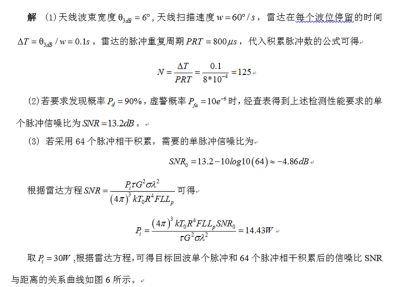
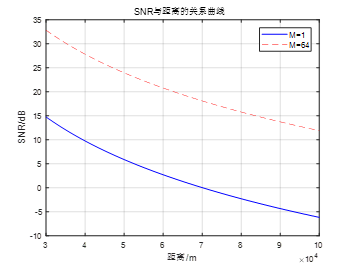
2.若天线在±45°范围内搜索,扫描速度为60°/s,可积累的脉冲数N =?若要求发现概率Pd =90%,虚警概率Pfa=10e-6,达到上述检测性能要求的SNR=?在搜索状态,若采用64个脉冲相干积累,计算要求的辐射峰值功率Pt =?若取Pt =30W,计算目标回波单个脉冲和64个脉冲相干积累后的信噪比SNR与距离的关系曲线(考虑信号处理损失5dB)。
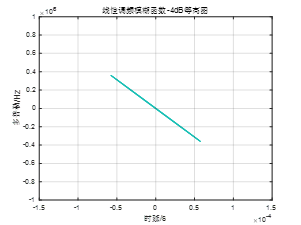
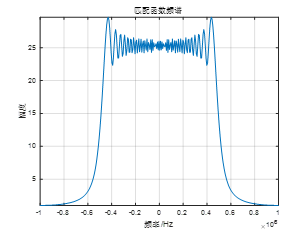
3.搜索工作状态时,(1) 给出所采用LFM信号的匹配滤波函数h(t)和H(f),并画图。比较加窗(主副瓣比35dB)和不加窗时的脉冲压缩结果,指出主瓣宽度。(纵坐标取对数)(2) 相位编码脉冲信号的多普勒敏感性。
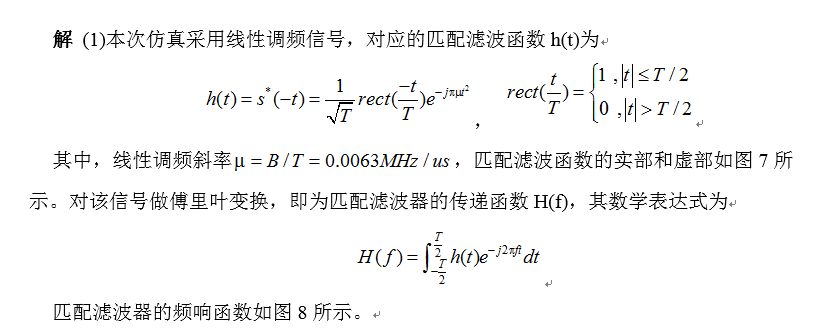
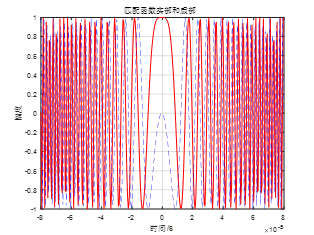
加窗前后的脉冲压缩结果如图9所示。
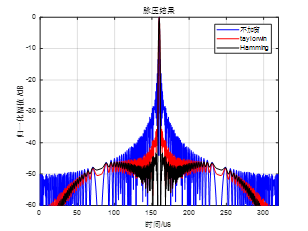
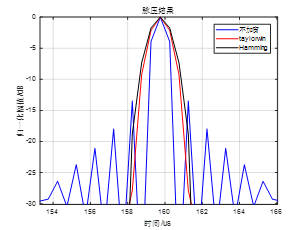
为了使主副瓣比至少为35dB,实验中分别加Hamming窗和Taylor窗,其中Hamming窗的最大旁瓣电平为-42.5dB,使Taylor窗的最大旁瓣电平为-35dB。可以看到,不加窗时,第一旁瓣电平为-13dB左右,即加窗后其旁瓣得到了有效的抑制,但其主瓣宽度稍微有所增加。从图10可以看出,加窗前后主瓣宽度展宽大约1us。
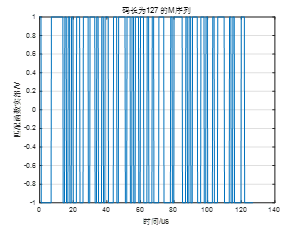
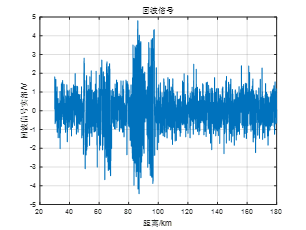
(2) 为了说明相位编码信号的多普勒敏感性,采用如下参数对M序列的脉冲压缩结果进行仿真。
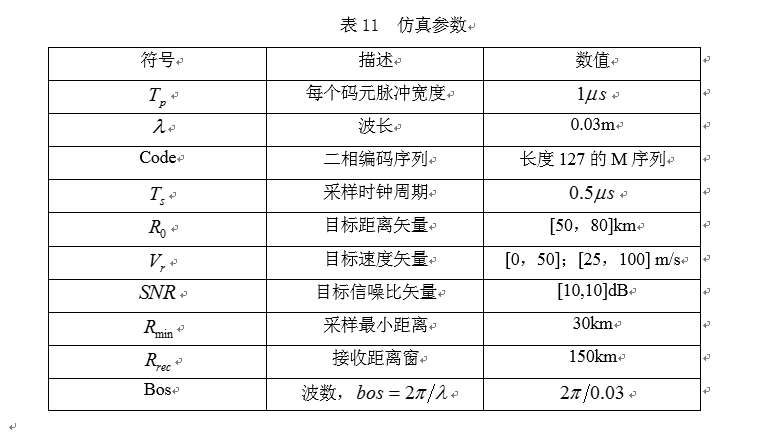
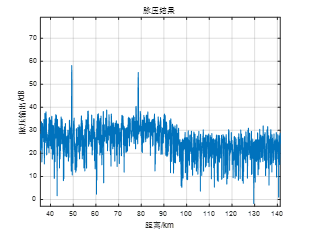
仿真结果如下图所示。图12为长度为127的M序列,图13是输入信号的实部,图14是目标速度为0和25m/s时的脉压结果,图15是目标速度为50m/s和100m/s时的脉压结果。所以,当目标的速度过大,其回波信号在整个脉冲宽度内由于多普勒频率而产生的相移过大,使得脉压处理时无法与发射信号的调制相位相匹配,从而导致脉压损失,甚至无法压缩出目标。故二相编码只适合于慢速运动目标的场合。
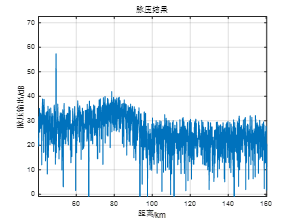
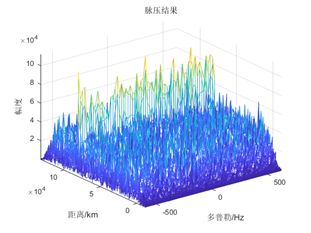
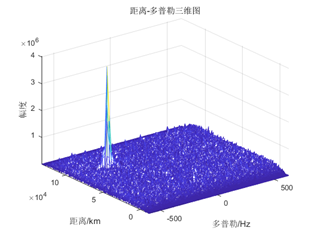
4.在搜索状态,假设目标距离为60~80km(任取一值)。假定中频正交采样频率fs =2MHz。(1)写出目标回波的基带信号模型,推导脉压、相干处理后的输出信号模型。(2)假设在相干积累前导弹自身的速度进行了补偿,若A/D采样时噪声占10位,目标回波信号占8位(即输入SNR=-12dB,考虑A/D变换器的量化误差)。画出A/D采样的回波基带信号、脉压处理后的输出信号、相干积累的输出信号。分析每一步处理的信噪比变化。(3)解释目标所在多普勒通道对应的频率与实际的多普勒频率是否相符?(4)对目标所在多普勒通道进行CFAR处理,画出目标所在多普勒通道信号及其CFAR的比较电平(检测概率0.9,虚警概率1e-6)。(除回波基带信号外,其它波形的纵坐标取对数)

脉冲压缩处理后的结果如图17所示,通过仿真得到信噪比为10.02dB。此时信噪比提升约22.02dB,理论上信噪比应提高10log(160)=22.0dB,实验结果与理论结果一致。
二、针对某阵列雷达的实测数据,给出如下处理结果:
数据文件:radar_data.mat,为三维数组3000 × 20 × 12,3000为距离单元,20为天线单元数(天线间隔0.625m),12为一个波位的脉冲数。其它参数上课给出。
对数据依次进行DBF、脉压、MTI、CFAR等处理。
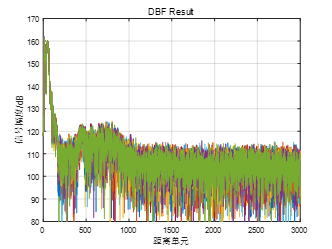
1. 给出波束指向为0°时的DBF处理结果,要求副瓣<-25dB。
解 当波束指向为0°时,各阵元的馈电相位差为零。DBF便是把所有同相信号空间相加。为了达到副瓣电平要求,需在DBF处理时进行加权处理,这里采用泰勒窗,结果如图21所示。
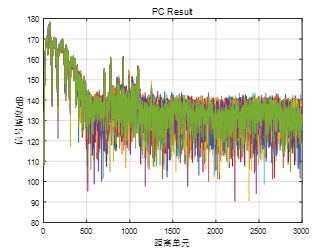
1. 给出脉压后的原始视频,要求副瓣<-35dB。(LFM信号: B=800KHz,Te=420us)
解 脉冲压缩时要求旁瓣低于-35dB,也需要使用加窗的方法。加窗后的脉压结果如图23所示。这里采用泰勒窗,结果如图22所示。
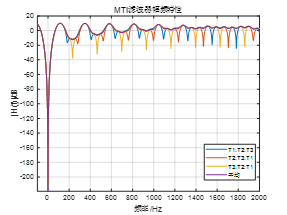
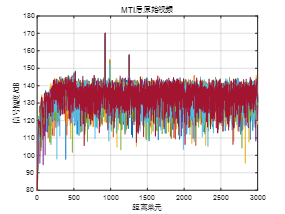
1. 设计四/六脉冲MTI滤波器,给出MTI后的原始视频。(雷达为三变T:4100:4400:4700 us)
解MTI的目的是滤除地杂波,由于通常杂波是分布在零频附近的,因此可以通过设计带阻滤波器去除杂波,即MTI滤波器。当信号周期固定时,MTI对应的盲速很低,因此在实际中通常采用变T,变T可以将盲速增大到各T的最小公倍数对应的周期所对应的盲速,这时的MTI需要对不同的延时乘以不同的权系数,而且还应注意要保证在信号通带内滤波器具有一定得平坦度。为了达到MTI滤波器的最佳性能,这里采用零点分配法设计四脉冲MTI滤波器,该滤波器的频响特性如图22所示,可以看到零频附近的零点深度约为-200dB。MTI后的原始视频如图23所示。
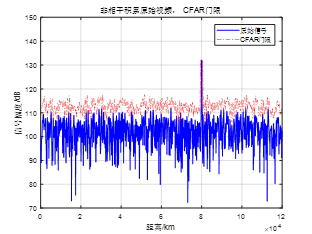
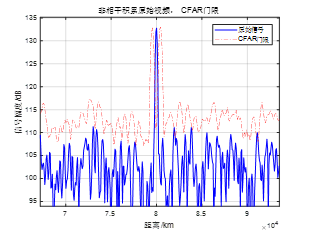
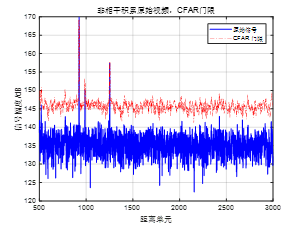
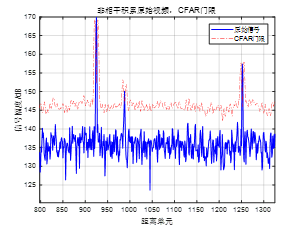
1. 对MTI后的原始视频进行非相干积累、CFAR处理,给出非相干积累后的原始视频和CFAR的噪声电平估计值(Pd=0.9,Pfa=1e-6. 画图并解释)。
解 对目标所在多普勒通道进行单元-平均CFAR,虚警概率Pfa = 10e-6,取参考单元数M=5,保护单元数N=3,MTI非相干积累的原始视频和单元-平均CFAR处理时的检测门限图如图24所示。
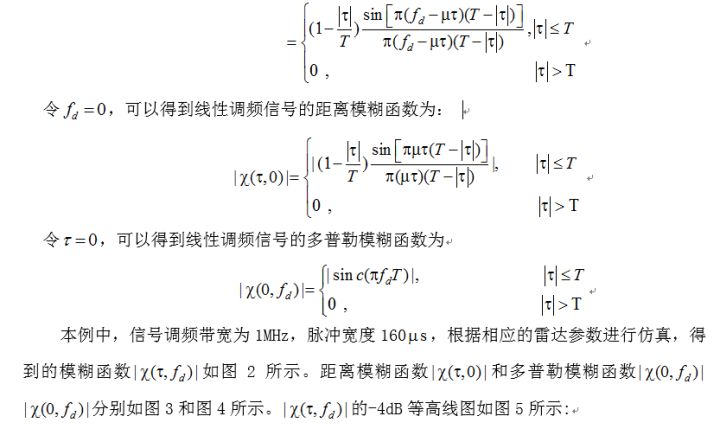
还有MATLAB代码和仿真的数据文件,对雷达信号处理感兴趣,需要学习的的可以向我咨询(是付费咨询,不是私信哈),好东西只给有趣的人。