【虹科案例】虹科脉冲发生器在雷达中的应用
01初级脉冲雷达初级雷达产生照亮目标的信号并接收其回波。根据调制(模拟或数字)和生成信号的不连续性,可以区分不同类型的雷达。最简
01初级脉冲雷达
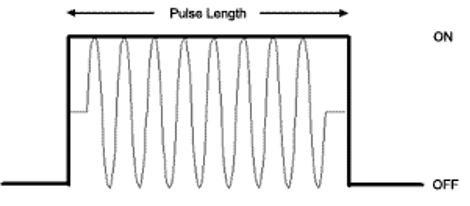
初级雷达产生照亮目标的信号并接收其回波。根据调制(模拟或数字)和生成信号的不连续性,可以区分不同类型的雷达。最简单的雷达是脉冲雷达,它不使用任何类型的调制,但它在短时间内产生信号并接收目标产生的反射信号的回波响应。
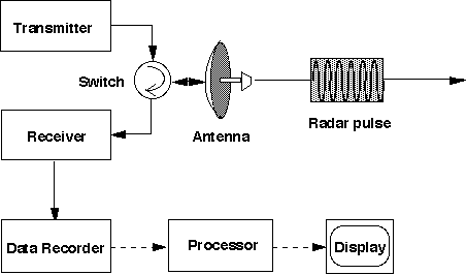
通过这种方式,它可以确定与物体的距离,计算发送信号和接收到的回波之间的飞行时间。 这种架构受到最大范围和分辨率之间权衡的限制:因此较大的脉冲会增加平均传输功率,然后增加最大范围,但会降低分辨率。出于这个原因,这种类型的雷达在远程控制中得到应用,主要用于空中交通管制和天气观测(尤其是降水)。
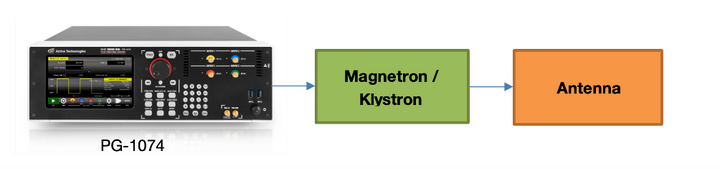
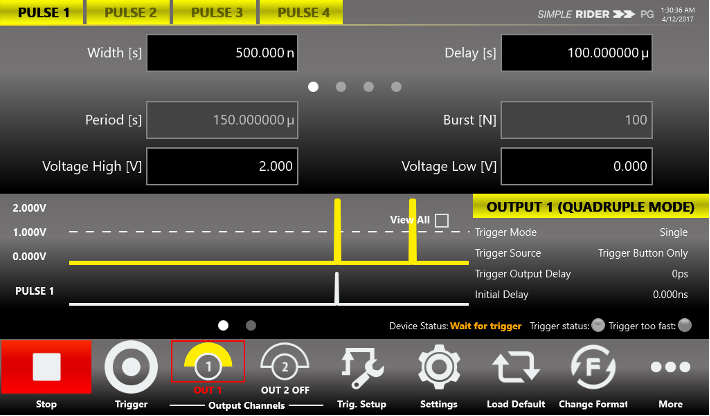
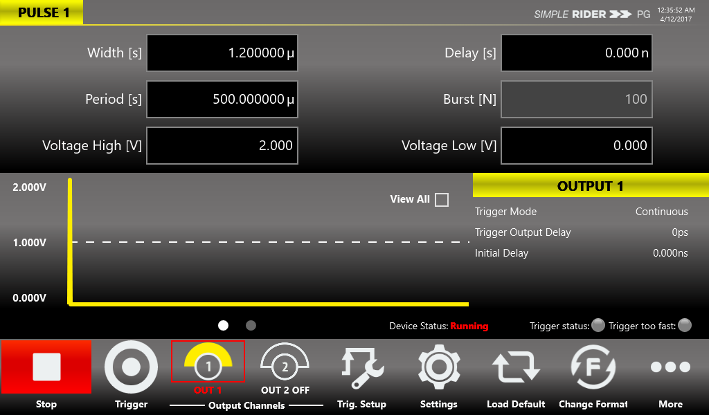
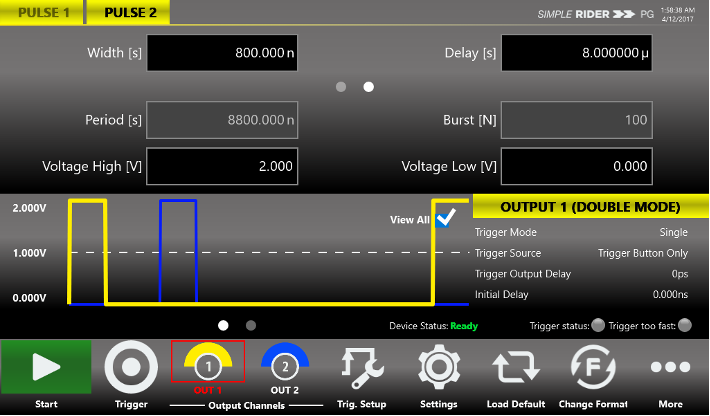
在系统开发过程中,使用脉冲发生器向 RF 调制链提供脉冲以测试接收器改变脉冲持续时间的行为是很有用的。Active Technologies Pulse Rider PG-1000 系列脉冲发生器允许使用图形界面和触摸屏显示器轻松创建具有不同脉冲宽度、重复率和振幅的脉冲。遵循此解决方案,可以节省开发脉冲系统的时间,并将精力集中在雷达设计和测试目标上。
02.二次雷达
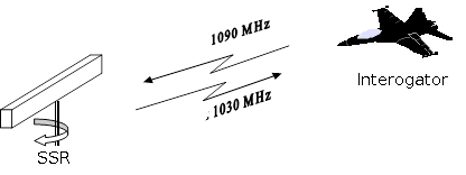
二次雷达是一种用于空中交通管制的特殊雷达,与飞机应答器协同工作。它使用脉冲代码询问应答器并等待响应; 根据传输的代码,它可以请求识别号、海拔高度等。
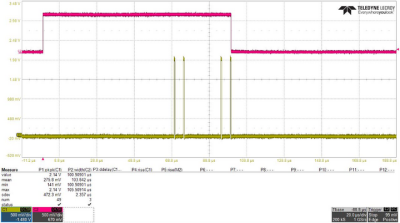
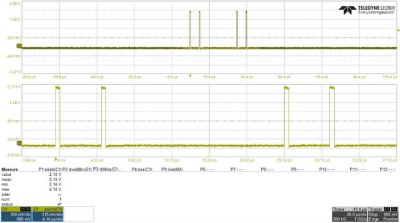
询问基带代码非常简单,它由 3 个脉冲组成,称为 P1、P2 和 P3,持续时间固定为 800 ns。第一个脉冲 (P1) 和最后一个 (P3) 由定向天线发射,通过它们之间的距离定义代码。第二个脉冲 (P2) 以全向方式传输,比第一个脉冲延迟 2 µs; 这个特定的脉冲是必要的,因为定向天线发射的次级波瓣可能会击中其他转发器,从而导致错误的响应和干扰。 转发器测量脉冲 P1 和脉冲 P2 期间的接收功率,并区分它是由主天线波瓣还是由次级天线波瓣到达,并在第一种情况下发送响应。
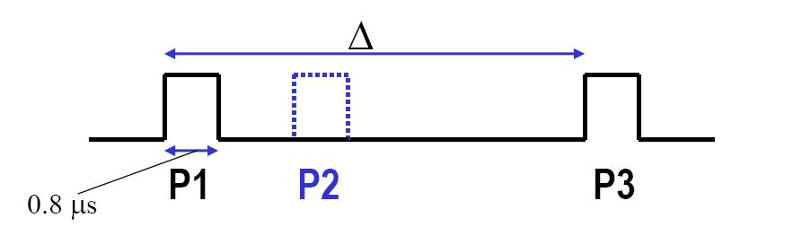
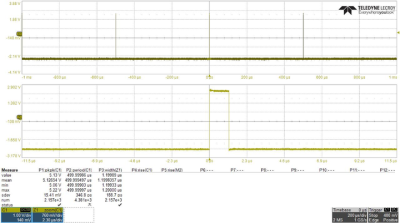
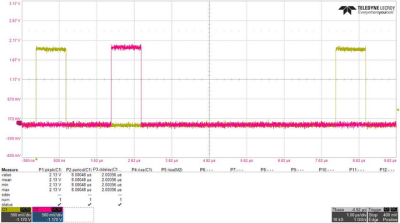
Pulse Rider PG-1000 系列允许产生具有用户定义的距离和持续时间的双脉冲 P1 和 P3,它提供 10 ps 的出色时间分辨率。 多个通道的存在非常适合为第二个脉冲 (P2) 提供延迟 2 µs 的第一个脉冲。 低于 25 ps 的抖动可确保通道之间的完美同步。
03.使用脉冲/延迟发生器的多目标模拟
在初级雷达系统中,精制系统测量信号的飞行时间以计算与目标的距离; 它使用以下等式提取距离: Distance(Km)=((DelayTime(sec)/2)*3×10^5 km/s 其中 3×10^5 km/s是光速的近似值。这意味着传输信号和接收信号之间的延迟取决于距离。在多个目标的情况下,接收到多个信号,检测系统必须能够区分它们。虹科Pulse Rider 脉冲发生器是测试检测链的完美选择,可缩短开发时间,无需完整的雷达系统和一些目标即可瞄准。
多脉冲模式提供双脉冲、三脉冲和四脉冲,具有不同的持续时间和触发输入信号的延迟,可以重复高达 125 MHz,用于测试检测系统的实时频率操作。10 ps 的分辨率和低于 25 ps 的抖动 RMS 提供了计算 RF 链预期延迟和模拟分辨率低于厘米的目标检测所需的精度。