A-炮架组成02-技术篇03-自动机(第一部分):火炮自动化、自动炮、自动机及自动机工作原理
说明:在之前的技术篇01~03中,我们依次讲解了火炮射击原理、炮身、炮架组成中的第一部分缓冲装置,技术篇04中,我们开始讲炮架组成的第
说明:在之前的技术篇01~03中,我们依次讲解了火炮射击原理、炮身、炮架组成中的第一部分缓冲装置,技术篇04中,我们开始讲炮架组成的第二部分——自动机。本篇框架如下:
一、火炮自动化、自动炮
(一)非自动炮与自动炮
根据火炮射击自动化程度,可将火炮分为自动炮、半自动炮和非自动炮三类。自动炮(Automatic Gun)是指能自动完成重新装填和发射下发炮弹全部动作的火炮。这些动作一般包括∶击发、收回击针、开锁、开闩、抽筒、抛筒、供弹、输弹、关闩和闭锁。若上述动作一部分自动完成,另一部分由人工完成,则此种火炮称为半自动炮(Semi-automatic Gun)。若全部动作均由人工完成,则称为非自动炮(Non-automatic Gun)。自动炮能进行连续自动射击,直至射手停止射击或弹夹(弹匣或弹带)内的炮弹耗尽(或剩一发)为止,而半自动炮和非自动炮则只能进行单发射击。
(二)按用途的自动炮分类
自动炮按其用途又可分为陆用自动炮、航空自动炮和舰艇自动炮等。虽然这些自动炮的自动机由于使用条件不同而有所差异,但在设计理论方面是基本一致的。
(三)自动炮重要技战术指标——射速
1、什么是射速?
对于自动炮来说,火炮发射速度是其主要战术技术指标。发射速度(Rate of Fire),又称射速,概括地说是指火炮在单位时间内能够发射的弹数。
2、射速分哪几种?怎么用?
具体地说,则分为理论射速(射击频率)、实际射速和极限射速。通常,把理论射速和实际射速统称为射速。
(1)理论射速(Cyclic Rate of Fire)
理论射速(Cyclic Rate of Fire),是指在不考虑外界条件的影响下,自动机在单位时间内可能发射的弹数(即自动机工作的循环次数)。可见,理论射速取决于自动机工作循环时间。在自动连续射击时,相继两次击发(或其他动作)间工作过程称为自动机一个工作循环,其延续时间(即单周期)称为自动机循环时间。
理论射速∶ 
式中, 


理论射速是自动机的一个主要特征数。理论射速的大小主要取决于火炮的口径、炮弹的尺寸和质量。自动机及其各机构的作用原理和构造,对理论射速也有很大影响。为了提高理论射速,可以采用以下措施∶缩短后坐部分和其他运动构件的行程,增大运动构件的速度;减少“死时间”(即各运动构件相互等待的时间),使各自动动作和各机构的工作过程在时间上重叠起来。
(2)实际射速(Actual Rate of Fire)
指把瞄准、修正瞄准、重新装填(更换弹夹、弹匣或弹带)以及更换或冷却身管所需时间考虑在内时,自动炮在单位时间内所能发射的弹数。由此可见,实际射速和理论射速不同,它是考虑到战斗使用时各种条件的特征数。为了提高实际射速,可采取以下措施∶提高理论射速;采用连续供弹装置;采用良好的身管冷却装置;采用与改进追随空中目标的随动系统;采用自动停射器等。
(3)极限发射速度(Utmost Rate of Fire)
又称发射速度规定,就是在一定时间内持续射击,在不损害火炮技术性能条件下,所允许发射的最大弹数。高射炮的极限发射速度,一般是根据持续射击时炮身温升情况确定的。通常限制炮身的最高温度,对小口径高射炮为400℃~450℃,对中口径高射炮为350℃(一般测量身管口部外表面)。这样可以避免身管材料的机械性能降低太多,炮膛烧蚀和磨损太快。三种高射炮的极限发现代空中目标的飞行速度不断提高,目标位置变化极快,使得每发弹丸的命中公算变得极小。为了抓住战机消灭目标,必须增加射击的火力密度,即增加单位时间内对目标的射弹数,亦即提高射速。射速越大,火力密度越大,命中公算也就越大。由此可见,从战术的观点出发,希望自动炮的射速越大越好。但是,射速的增大会受到技术条件的限制。
(4)射频数与变射频自动炮
火炮自动机有固定一种射频的,也有两种射频的或三种射频的。通常,称有一种射频以上的自动机为变射频自动机。变射频是根据战术上的使用要求而提出的。
现代火炮自动机具有多用途性,可对付空中快速飞行目标,也可对付地面上慢速运动目标。对付空中目标,无论是从提高毁歼概率的角度出发,还是从提高武器系统生存能力、自卫能力角度出发,都要求火炮自动机具有较高射频。当自动炮对地面目标射击时,对于高射速的高射武器,为了更有效地利用炮弹,可降低射速使用。对于步兵战车的车载自动炮,主要对付地面轻型装甲车辆,并要求较高的命中率,为此也要用较低射频进行射击。高射速是对飞行目标提高毁歼概率所追求的。但同时高射速又给自动机带来高运动速度、高撞击速度,最终影响是加大身管炮口振动。弹丸始终是在炮口振动中射出,影响射击密集度,加大了射弹散布。这样的射速对首发命中率要求较高的地面装甲目标射击显然效果是不好的。降低射频主要是为了减小火炮振动对射击精度和散布的影响,以提高命中率,同时又能有效地减少弹药的消耗。为了提高射击效果,对不同运动速度和性质的目标采用不同射速,是变射频基本设计指导思想。这一设计思想在实践中被证明是正确的。如某25mm战车炮,射击条件相同,只改变射频,其立靶密集度值有明显的不同∶射频100r/min时,立靶密集度小于1.0密位×1.0密位;射频400r/min时,立靶密集度为2.0密位×3.0密位。
二、火炮自动机的概念、组成、分类
(一)火炮自动机
火炮自动机(Automatic Mechanism of Gun,以下简称自动机)是自动炮核心部分,是自动完成重新装填和发射下发炮弹实现连发射击的各机构的组合。
(三)火炮自动机组成
通常,从工作原理讲,应包括下述各装置或构件∶
1、炮身(Barrel Assembly)
包括身管、炮尾和炮口装置。与非自动炮一样,身管的作用是赋予弹丸一定的飞行方向和炮口速度,并使其具有一定的自转角速度。
2、炮闩(Breechblock)
包括关闩、闭锁、击发、开闩和抽筒等机构。与这些机构相对应,它将完成开闩和关闩、开锁和闭锁、击发、抽筒等动作。
3、供弹和输弹机构(Feeding and Ramming Mechanism)
用来依次向自动机内供给炮弹,并把最前面的一发输入炮膛。
4、反后坐装置(Recoil and Counter Recoil Mechanism)和缓冲装置(Buffer Mecha-nism)
用于吸收未被自动机工作所消耗的后坐动能,控制火炮的后坐与复进运动,并减小射击时作用于炮架的力。
5、发射机构(Firing Mechanism):用于控制火炮的射击。
6、保险机构(Safety Mechanism)∶用于保证各机构可靠的工作和正确的相互作用,以及保障勤务操作的安全。
7、其他辅助机构
除上述主要机构(装置或构件)外,自动机还有若干辅助机构。例如,为第一次装填、更换身管和分解结合自动机等所设置的机构。采用这些机构,可以减少操作和减轻炮手体力消耗。自动机的这些机构,依靠炮箱(或摇架)组成一个整体,并安装在炮架上。
(三)火炮自动机分类
根据自动机利用能量的不同和结构特点,把火炮自动机分成以下几类∶
1、第一类∶后坐式自动机(Recoil Operated Automatic Mechanism)。利用半能量的自动机。
2、第二类∶导气式自动机(Gas Operated Automatic Mechanism)。利用从炮膛中导出火药燃气能量的自动机。
3、第三类∶转膛式自动机(Revolving Chamber Automatic Mechanism)。利用后坐或从炮膛中导出的火药燃气能量使几个药室转动的自动机。
4、第四类∶转管式自动机(Revolving Barrel Automatic Mechanism)。利用外部能源使几个身管转动的自动机。
5、第五类∶链式自动机(Chain Automatic Mechanism)。利用外能源通过链条带动闭锁机构工作的自动机。
三、第一类自动机讲解∶后坐式自动机(Recoil Operated Automatic Mechanism)
(一)第一类自动机种类
这类自动机的共同作用原理是利用后坐动能使自动机各机构工作。根据利用后坐动能不同方法,可将此类自动机划分为三种∶
1、炮闩后坐式自动机(Bolt Recoil Operated Automatic Mechanism)。炮身不动,或只做很小的缓冲运动,主要利用炮闩后坐动能进行工作的自动机。
2、炮身短后坐式自动机(Barrel Short Recoil Operated Automatic Mechanism)。炮身后坐长小于炮弹长,利用炮身和炮闩后坐动能进行工作的自动机。
3、炮身长后坐式自动机(Barrel Long Recoil Operated Automatic Mechanism)。炮身后坐长大于炮弹长,利用炮身和炮闩后坐动能进行工作的自动机。
(二)炮闩后坐式自动机
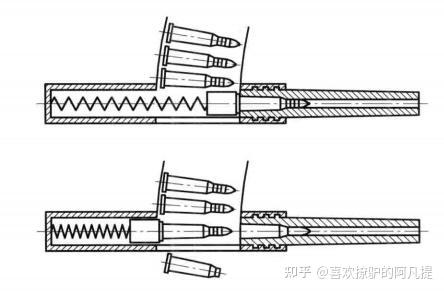
如上图所示,这组自动机的炮身与炮箱为刚性连接,炮闩在炮箱中后坐和复进,并为带动各机构工作的基础构件。发射时,作用于药筒底的火药燃气压力推动炮闩后坐,抽出药筒,并压缩炮闩复进簧以贮存能量。炮闩在其复进簧作用下做复进运动的同时,把炮弹推送入膛。这种自动机的供弹机构的工作,通常利用外界能源,例如,弹匣或弹鼓中的弹簧能量,当然也可利用炮门的能量。
炮闩后坐式自动机根据炮闩运动的特点还可分为自由炮闩式自动机和半自由炮闩式自动机。自由炮闩式自动机具有自由的炮闩,发射时,炮闩不与身管相联锁,它主要依靠本身的惯性起封闭炮膛的作用。击发后,当火药燃气推药筒向后的力上升到大于药筒与药室间的摩擦力和附加在炮门上的阻力后,炮闩就开始后坐并抽筒,因此这种自动机抽筒时膛内压力较大,容易发生拉断药筒的故障。为了减小炮闩在后坐起始段的运动速度,就得加大炮闩的质量。可见,具有笨重的炮闩是自由炮闩式自动机的特点。
自由炮闩式自动机的优点是结构简单,理论射速高。缺点是抽筒条件差、故障多,炮闩重。这种原理过去曾应用于小威力的火炮自动机。例如,瑞士厄利空(Olerlikon)20mm 高射炮用过,现已很少采用。采取某种机构来阻滞炮闩在后坐起始段运动的自动机称为半自由炮闩式自动机,这种原理在火炮自动机中也很少采用。
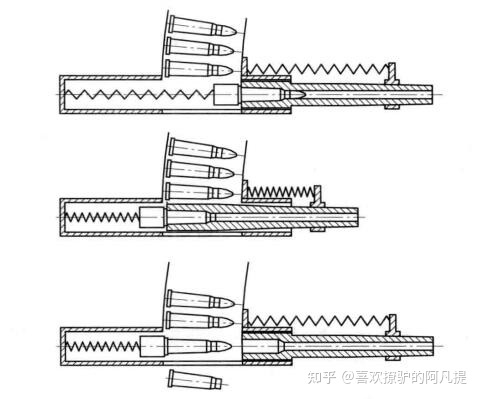
(三)炮身短后坐式自动机
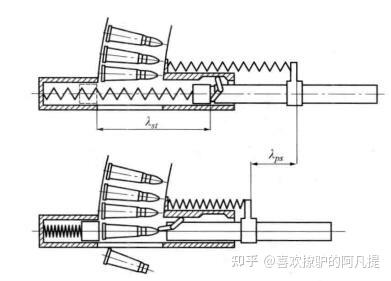
如上图所示,这组自动机的身管与炮尾在炮箱或摇架内后坐与复进。炮身是带动各机构工作的基础构件。击发后,炮身与炮闩在闭锁状态下一同后坐一短行程(占炮闩行程的1/2~2/3),在后坐或复进过程中,利用开闩机构完成开锁、开闩和抽筒。图8-2中, 
(四)炮身长后坐式自动机
如上图所示,这组自动机的基础构件是炮身和炮闩。击发后,炮身与炮闩一起后坐(其后坐长略大于炮弹长),开始复进时,炮闩被发射卡锁卡在后方位置,炮身继续复进完成开锁、开闩和抽筒动作。炮身复进终了前,通过专门机构解脱炮门,炮闩便在复进簧作用下输弹入膛,并进行闭锁和击发。这组自动机的优点是后坐力小,结构比炮身短后坐式的简单。理论射速低是这组自动机的重大缺点,其原因是后坐长度长后,炮身后坐和复进时间就长,加上各机构又依次动作,所以自动机循环时间就比短后坐式自动机要长得多,理论射速也就低得多。例如,德国克鲁伯-37自动机的理论射速仅120 r/min,维克斯-37自动机的理论射速仅100 r/min。正因为如此,长后坐式自动机未被广泛采用。
四、第二类自动机讲解∶导气式自动机(Gas Operated Automatic Mechanism)
(一)第二类自动机种类
导气式自动机又称气退式自动机。它是利用由炮膛内导出的火药燃气的能量来使自动机各机构工作。根据炮身和炮闩运动关系的不同,可把此类自动机分为两种。
1、炮身不动的导气式自动机。炮身与炮箱刚性连接的导气式自动机。
2、炮身运动的导气式自动机。炮身可沿炮箱后坐与复进的导气式自动机。
(二)炮身不动的导气式自动机
如下图所示,这组自动机的炮身与炮箱为刚性连接,不能产生相对运动。但是,为了减小后坐力,这组自动机通常都在炮箱与摇架间设有缓冲器。这样,整个自动机要产生缓冲运动。
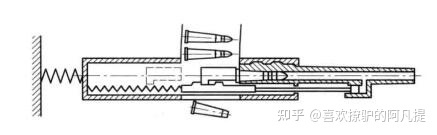
击发后,当弹丸经过身管壁上的导气孔后,高压的火药燃气就通过导气孔冲入导气装置的气室,推动气室中的活塞运动,活塞带动活塞杆并使自动机活动部分向后运动,进行开锁;而后带动闩体进行开闩和抽筒,与此同时压缩复进簧并带动供弹机构工作。炮闩后坐停止后,在其复进簧作用下复进并推弹入膛,而后闭锁、击发,完成一个射击循环。属于这组的自动机有英国MK-20、苏联B-20、苏联B9-23、苏联AM-23等。
(三)炮身运动的导气式自动机
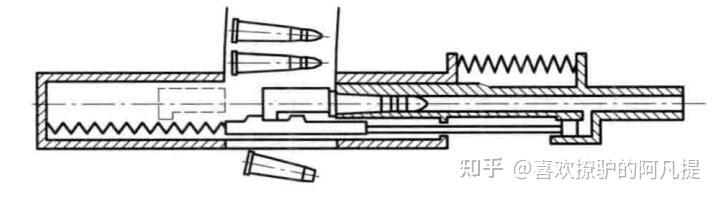
如上图所示,这组自动机的炮身可沿炮箱后坐与复进,而炮箱与摇架之间为刚性连接。这组自动机的工作情况与炮身短后坐式自动机有些相似,不过,这时起加速机构作用的是导气装置,它带动炮闩进行开锁、开闩、并使供弹机构工作。这组自动机的供弹台是不动的,因此对供弹无不利影响。与第一组相比,这组自动机的理论射速要低些,机构也要复杂些,因此,在导气式自动机中应用得较少。法国哈其开斯-25和37自动机属于这种型式,它的供弹方式是弹匣供弹,亦即供弹利用了外界能量。如果供弹机构不依靠外界能量而由炮身运动来带动,那么自动机工作既利用了导气的能量,又利用了后坐能量,这样的自动机称为混合式自动机,德国41式50和43式37自动机就是混合式自动机。
(四)导气式和混合式自动机的应用
导气式和混合式自动机还可采用复进击发(浮动)原理来减小后坐力,提高理论射速和改善射击密集度。导气式自动机活动部分质量较轻,通过调整导气孔的大小可以大幅度地改变火药燃气对活塞作用冲量的大小,因此导气式自动机的理论射速较高,而且自动机机构也比较简单,这是主要优点。但由于火药燃气对活塞作用的时间较短,所以活动部分必须在很短时间内获得所需的后坐动能,这样,活动部分运动初期的速度和加速度就比炮身短后坐式的大得多,而且容易产生剧烈的撞击,这就是导气式自动机的缺点。导气式自动机通常应用于口径小于37mm的自动炮,口径越小,导气式自动机的优点越显著。现代20mm口径的自动炮绝大部分是采用导气式自动机,并且应用了浮动原理。例如,瑞士HS820、西德MK20Rh202及瑞士GDF-003型双管35自动炮等。
五、第三类自动机讲解∶转膛式自动机(Revolving Chamber Automatic Mechanism)
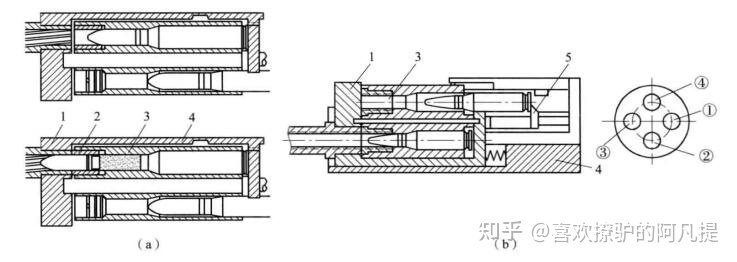
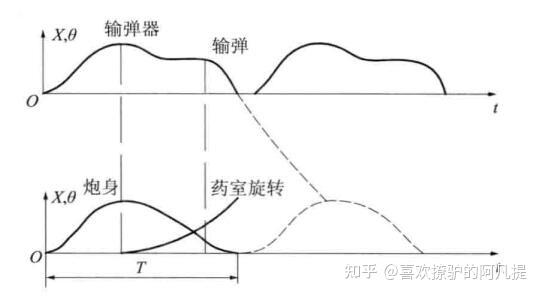
转膛式自动机(如上图所示)的特点是炮身由两段所组成,后段具有多个能旋转的药室(一般4~6个药室),每发射一次,药室转动一个位置。药室转动和供弹机构的工作,可以利用炮身后坐能量,也可利用导气的能量。由于这类自动机具有多个药室,所以自动机各机构的工作在时间上可以互相重叠或同时进行。例如,在药室②进行发射的同时,其他药室可进行输弹和抽筒。
后坐停止后,在复进簧的作用下复进,并带动药室旋转一个位置。在炮身复进到位和药室旋转到位后,电路接通,点燃第二发炮弹的装药,开始第二个循环。在复进末期,开始第三发炮弹的输弹,直到第二次后坐末期炮弹完全进入药室④。图8-7是转膛式自动机的位移—时间循环图。利用它可清楚地显示上述动作过程。
转膛式自动机的优点是理论射速高。例如,69式30舰炮理论射速达1050r/min,美国MKⅡ双管20自动炮理论射速为4000 r/min。缺点是∶横向尺寸大、质量大、炮膛连接处漏气使初速下降,人员不能靠近。因此,这类自动机仅应用于遥控操作的航炮和舰炮上。
六、第四类自动机讲解∶转管式自动机(Revolving Barrel Automatic Mechanism)
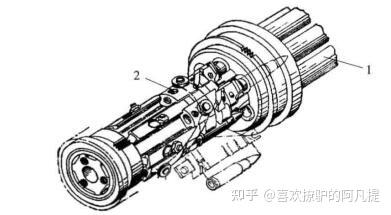
这种自动机是火炮发展中的新结构,它是利用外界能源完成自动动作的。一门火炮由几根身管组成,这些身管围绕着同一轴线平行地安装在一个圆周上,发射时身管都围绕着这一轴线旋转,一次只有一根身管发射,而其余的身管则分别进行装填、闭锁和抽筒等动作。
下图所示为一个六管转管自动炮。六管共用一个供弹系统和一个发射系统,并采用同样的炮闩。六个炮闩由一条凸轮环带依次带动。自动机的驱动动力是马达。发射时,装填、闭锁、击发和抽筒等动作时间是重叠的,因此具有较高的射速。
这类自动机的优点是∶
(1)理论射速很高,并且可以根据不同情况加以改变。由于采用外部能源,因此比利用火药燃气能量对设计的限制要小,可选择适当的方案实现很高的理论射速,例如美国“伏尔肯”20六管航空炮,理论射速达到6000r/min。如果改变传动装置的速比可以方便地改变理论射速,例如美国"伏尔肯"20六管牵引高射炮,当对空射击时理论射速为3000r/min,对地射击时为1000r/min。
(2)在相同的威力条件下,多管武器总的体积及质量比同样门数的单管武器的体积及质量之和要小。
(3)自动机的工作与炮弹发火情况无关,因此消除了一般自动机由于炮弹不发火而引起的故障,提高了可靠性。
(4)电底火可以缩短点燃装药的时间,提高可靠性。
这类自动机的缺点是∶
(1)必须有迟发火的保险装置。由于自动机工作与炮弹发火情况无关,因此,当由于弹药受潮等原因引起迟发火时,可能在膛压很大时开锁和开闩,发生事故。因此必须设置保险装置,在迟发火时使炮闩延迟开闩。
(2)由于射击时火药燃气对膛底作用力直接传给炮箱,因此需要采用整个自动机缓冲的方法减小后坐力。
(3)必须有外部能源。
七、第五类自动机讲解: 链式自动机(Chain Automatic Mechanism)
链式自动机是利用外能源通过链条带动闭锁机构工作的自动机。主要环节是由一根双排滚柱链条与4个链轮组成的矩形传动轨道。直流电机通过一组螺旋伞齿轮带动装在炮箱前方的立轴,然后直接驱动主动链轮和供弹系统。链条的主链节上固定有一垂直短轴,上面装有炮闩滑块(T形),与炮闩支架下部滑槽相配合。当链条转动带动滑块前后移动时,闩体支架也同时被带动在纵向滑轨上做往复运动(如下图所示)。
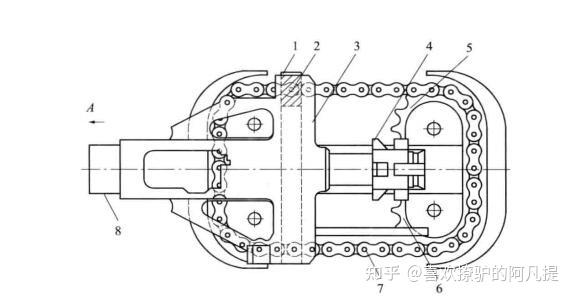
闩体支架到达前方时,迫使闩体沿闩体支架上的曲线槽做旋转运动而闭锁炮膛。闩体支架向前时完成输弹、闭锁、击发动作;闩体支架向后时,完成开闩、抽壳等动作。炮闩滑块横向左右移动时,将在T形槽内滑动,闩体支架保持不动。支架在前面时为击发短暂停留时间,在后面时为供弹停留时间。链条轨道的长度和宽度根据炮弹的长度和循环时间的关系确定,射手可在最大射速范围内,根据需要由直流电机无级调整射速。
链式自动机的主要特点如下∶
(1)链式自动机简化了自动机本身的结构,即无输弹机、无炮闩缓冲器、无反跳锁机构,但增加了供弹系统的动力传动机构和控制协调机构。
(2)炮闩通过炮尾直接与身管连接,炮箱不受力,使炮箱这个结构最复杂的部件得到简化,易加工,寿命长。这是与一般结构自动机的明显区别。
(3)链驱动炮闩复进、闭锁、击发、开闩、抽壳、供弹,运动平稳,撞击小,既可提高自动机零部件寿命,又有助于提高射击密集度。